
حفاظت در برابر خطا زمین در موتور ها
یکی از رایج ترین خطاهایی که در موتور رخ میدهد خطای سیم پیچ استاتور است. شکل ابتدایی خطا (فاز-به-فاز و غیره) یا علت پدید آمدن آن (گرمای بیش از حد چرخهای و غیره) هرچه که باشد، وجود قاب و پوشش فلزی اطراف باعث میشود که این خطا به سرعت به خطای زمین تبدیل شود.

بنابراین، تامین حفاظت در برابر خطای زمین بسیار مهم است. نوع و حساسیت حفاظت ارائه شده بستگی زیادی به سیستم ارتینگ دارد، که به ترتیب به بررسی انواع مختلف پرداخته خواهد شد.
با این وجود، معمول است که هر دو المان فوری و تاخیری رله را برای خطاهای اساسی و کند داشت.
فهرست مطالب
1-سیستم کاملا زمین شده
2-سیستمهای ارتینگ (زمین شده) مقاومتی
3-ارتینگ با مقاومت پایین
4-ارتینگ با مقاومت بالا
5-سیستم زمین عایقدار
6-نامتعادلی جریان شارژ سیستم
7-روش ولتاژ باقی مانده
8-سیستم زمین شده با سیمپیچ پترسون
9-مثال حفاظت در برابر خطای زمین موتور فشار قوی
۱) سیستم کاملا زمین شده
به دلایل ایمنی پرسنل، بیشتر سیستمهای فشار ضعیف در این گروه قرار میگیرند. معمولا دو نوع حفاظت در برابر خطای زمین، بسته به حساسیت مورد نیاز وجود دارد.
برای کاربردهایی که حساسیت بزرگتر از ۲۰٪ جریان نامی پیوسته ی موتور قابل قبول است، میتوان از حفاظت متداول در برابر خطای زمین با کمک اتصال CT مطابق بر شکل ۱ استفاده کرد.
در اثر نامتعادلی احتمالی بار و یا جریانهای خازنی سیستم (برای سیستمهای فشار قوی)، حد پایینی در تنظیمات اعمال میشود.
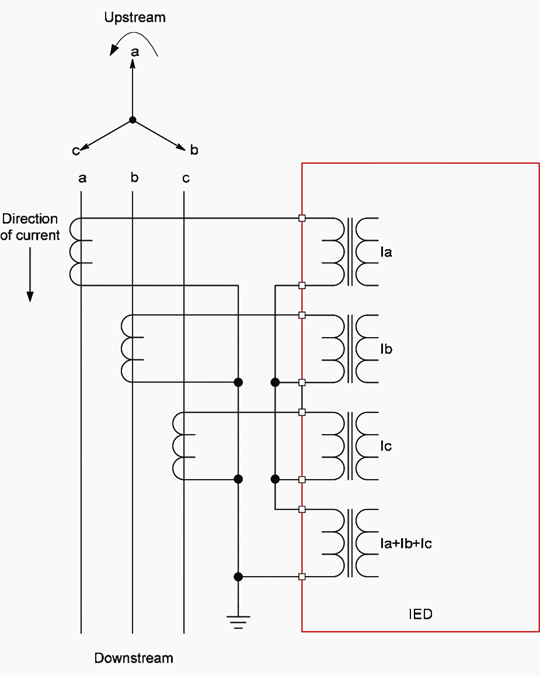
باید اطمینان حاصل کرد که رله بخاطر جریان نشتی ناشی از اشباع CT در هنگام راه اندازی موتور عمل نکند، که در آن جریان های زیاد تقریبا باعث اشباع CT موتور میشوند.
معمولا از یک مقاومت پایدارساز بصورت سری با رله استفاده میشود که مقدار آن با استفاده از فرمول زیر محاسبه میشود:
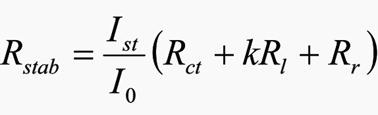
این مقادیر مقاومت پایدارساز بصورت سری با رله قرار میگیرد
که:
Ist = جریان راه اندازی در سمت ثانویهی CT است
I0 = جریان تنظیمی خطای زمین رله (A)
Rstab = مقدار مقاومت پایدارساز (اهم)
Rct = مقاومت dc سمت ثانویه ی CT (اهم)
Rl = مقاومت تک سر CT (اهم)
Rr = مقاومت رله (اهم)
k = ضریب اتصال CT (برابر با ۱ برای نقطه ی ستاره در CT ، ۲ برای نقطه ی ستاره در رله)
مقاومت پایدارساز موجب افزایش تنظیمات [جریان] موثر رله در این شرایط و در نتیجه تاخیر تریپینگ (قطع) است.
هرگاه از مقاومت پایدارساز استفاده شود، مشخصه ی قطع باید بطور نرمال بصورت لحظه های باشد.
روش جایگزین بجای مقاومت پایدارساز بهره گیری از مشخصه ی تاخیر زمانی معین است. تاخیر زمانی استفاده شده معمولا باید با آزمون و خطا پیدا شود، زیرا تاخیر زمانی باید به اندازه کافی طولانی باشد تا از عملکرد نادرست در هنگام راه اندازی موتور جلوگیری کرد، و از طرفی باید به اندازه ی کافی کوتاه باشد تا در صورت بروز خطا حفاظت موثری از آن به عمل آید.
هماهنگی با سایر دستگاهها نیز باید در نظر گرفته شود.
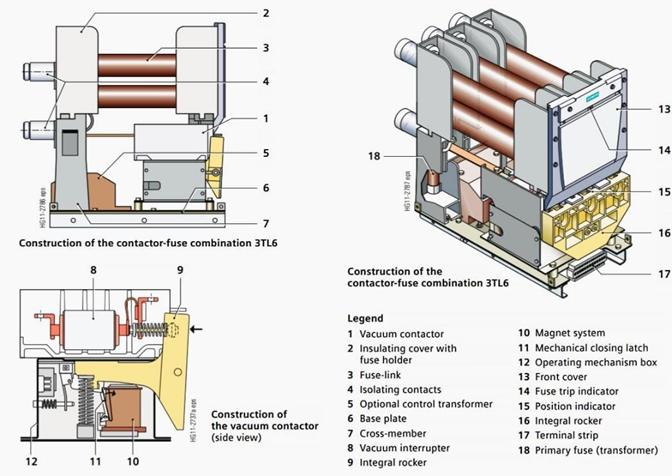
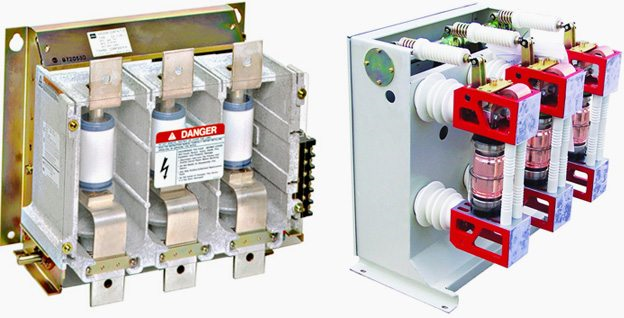
خود کنتاکتور قادر به قطع جریان خطایی نیست که مقدار آن بزرگتر از مقداری مشخص است، که بطور معمول کمتر از حداکثر جریان خطای سیستم خواهد بود – در این شرایط از فیوز کمک گرفته میشود.
شکل ۲ – در مواردی که سوئیچینگ مکرر و ایمن برای موتورهای سه فاز لازم باشد، از ترکیبهای فیوز-کنتاکتور نوع 3TL6 ساخت زیمنس استفاده میشود.
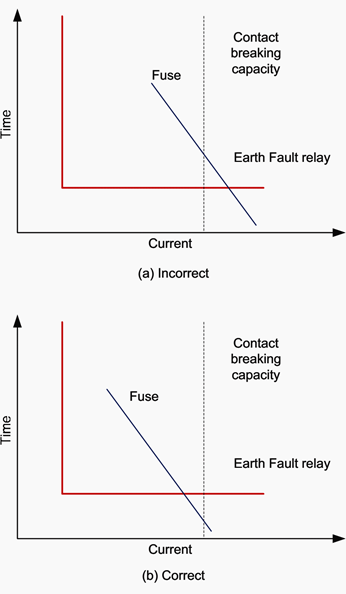
با توجه به اینکه فرمان قطع ارسالی از رله موجب باز شدن کنتاکتور میشود، باید اطمینان حاصل شود این امر تحقق نیابد مگر اینکه فیوز زمان کافی برای عمل کردن داشته باشد.
شکل ۳ (الف) درجه بندی نادرست رله با فیوز را نشان میدهد، رله ابتدا برای طیف وسیعی از جریانهای خطا فراتر از ظرفیت شکست کنتاکتور عمل میکند. شکل ۳ (ب) درجه بندی صحیح را نشان میدهد. برای دستیابی به این هدف، ممکن است نیاز به استفاده از تاخیر زمانی مشخص در رله باشد.
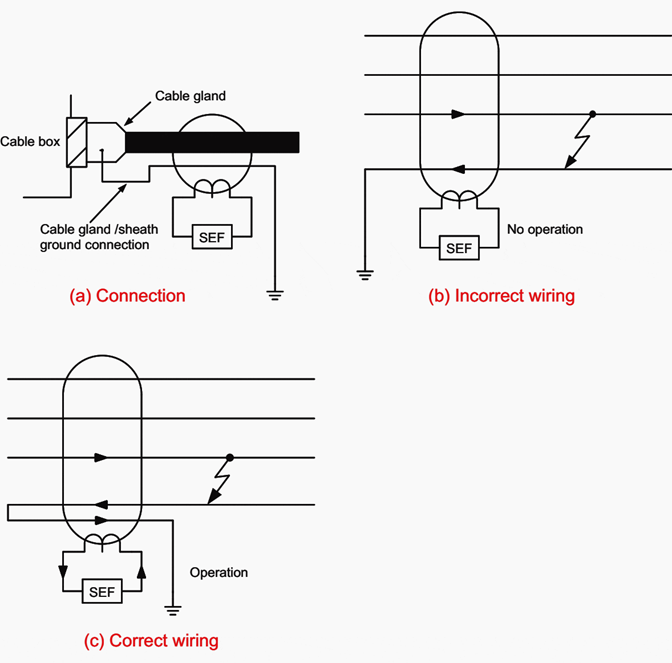
در صورت نیاز به تنظیمات حساس تر رله، استفاده از CT کور بالانس (CBCT) ضروری است. این نوع CT یک CT از نوع حلقوی است که تمام فازهای تغذیه ی موتور به علاوه سیستم خنثی در سیستم چهار سیمه از طریق آن عبور میکند.
الزامات جریان مغناطیس کننده نیز با CT تک هسته ای بجای سه CT کاهش مییابد.
شکل ۴ کاربرد CT کور بالانس شامل مسیریابی غلاف کابل را برای اطمینان از عملکرد صحیح در صورت رخداد خطاهای غلاف هسته ی کابل نشان میدهد.
۲) سیستمهای ارتینگ (زمین شده) مقاومتی
این سیستمها معمولا در سیستمهای فشار قوی استفاده میشوند که در آن هدف محدود کردن آسیب ناشی از خطاهای زمین از طریق محدودسازی جریان خطای زمین است که ممکن است جریان پیدا کند.
بطور معمول از دو روش ارتینگ مقاومتی استفاده میشود: ارتینگ با مقاومت پایین و با مقاومت بالا. این دو روش به ترتیب توضیح داده خواهد شد.
۲-۱) ارتینگ با مقاومت پایین
در این روش، مقدار مقاومت برای محدود کردن جریان خطا تا حد چند صد آمپر انتخاب میشود – مقادیری بین ۲۰۰ تا ۴۰۰ آمپر معمول هستند.
با اتصال CT خط، حداقل حساسیت ممکن تقریبا برابر با ۱۰٪ جریان نامی اولیه است که این امر بخاطر احتمال اشباع CT در زمان راهاندازی است.
برای CT کوربالانس، حساسیتی که با استفاده از المان رلهی خطای زمین غیرجهتدار ساده امکانپذیر است به سه برابر جریان شارژ حالت ماندگار فیدر محدود میشود.
این تنظیمات نباید بزرگتر از تقریبا ۳۰٪ از حداقل خطای زمین مورد انتظار باشد. علاوه بر این، ملاحظات در رابطه با تنظیمات و تاخیرهای زمانی مطابق بر سیستمهای کاملا زمین شده است.
۲-۲) ارتینگ با مقاومت بالا
در برخی از سیستمهای فشار قوی، از ارتینگ مقاومت بالا برای محدود کردن جریان خطای زمین تا چند آمپر استفاده میشود. در این حالت، جریان شارژینگ خازنی سیستم معمولا از حفاظت در برابر خطای زمین حساس اعمالی ممانعت بعمل میآورد زیرا مقدار جریان شارژ در مقایسه با جریان خطای زمین رخ داده قابل توجه خواهد بود.
راهکار این امر استفاده از رله ی خطای زمین جهت دار حساس است.
CT کوربالانس در کنار VT که از آن برای اندازه گیری ولتاژ مانده استفاده میشود با زاویه ی مشخصه ی تنظیمی رله +45ºC بکار برده میشود. VT باید برای رله مناسب باشد و در نتیجه باید با سازنده ی رله در رابطه با انواع مناسب مشورت شود – برخی از رلهها مستلزم این هستند که VT بتواند شار مانده را انتقال داده و در نتیجه استفاده از VT ۳-فاز ۳-شاخهای مرتفع میشود.
تظیمات ۱۲۵٪ جریان شارژینگ خازنی تکفاز برای کل سیستم با استفاده از این روش امکانپذیر است. تاخیر زمانی مورد استفاده بحرانی نیست اما باید به قدر کافی برای قطع سریع تجهیزات در صورت رخداد خطای زمین ثانویه بلافاصله بعد از اولین خطا سریع باشد.
حداقل آسیب توسط خطای اول ناشی میشود اما دومین خطا بطور موثری مقاومت محدودکنندهی جریان در مسیر خطا را رفع میکند که به جریانهای خطای بسیار بزرگ منتهی میشود.
روش دیگر که از تشخیص ولتاژ مانده استفاده میکند امکانپذیر است و در بخش بعدی (در زیر) توضیح داده خواهد شد.
۳) سیستم زمین عایقدار
تشخیص خطای زمین مشکلاتی بر روی سیستمهایی که ارت ایزوله دارند در پی دارد زیرا هیچ جریان خطایی برای خطای زمین تک فاز عبور نمیکند. اماُ تشخیص همچنان ضروری است زیرا اضافهولتاژها بر روی فازهای بدون خطا پدید میآید و لازم است خطا را قبل از رخداد خطای دوم یافته و رفع کرد.
دو روش امکانپذیر است:
تشخیص نامتعادلی منتجه در جریانهای شارژینگ سیستم
اضافهولتاژ مانده.
۳-۱) نامتعادلی جریان شارژینگ سیستم
حفاظت خطای زمین حساس با استفاده از CT کور بالانس برای این طرح لازم است. اصول این کار همانند اصولی است که تاکنون توضیح داده شده است به استثنای شیفت فاز ولتاژ که بجای 90ºC+ برابر با 90ºC- است.
برای نشان دادن این امر، شکل ۵ در زیر توزیع جریان در سیستم ایزوله را در فاز C-به-زمین نشان میدهد و شکل ۶ دیاگرام برداری رله را برای این شرایط ترسیم کرده است.
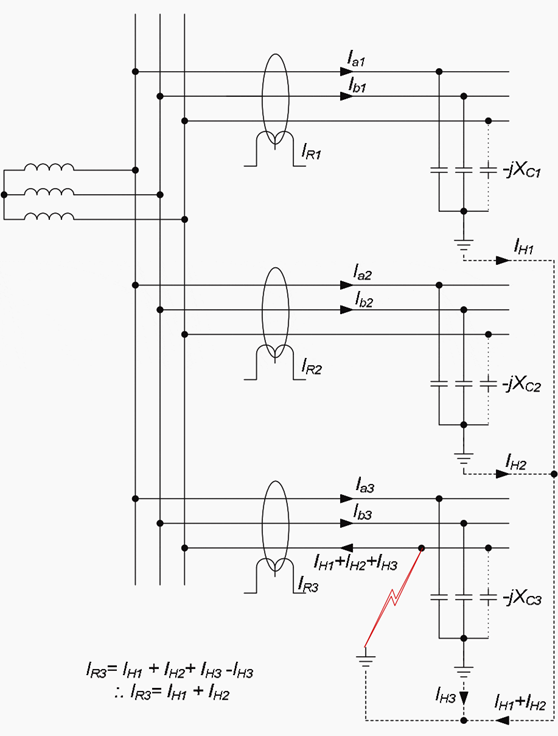
جریان مانده تشخیصی توسط رله برابر است با مجموع جریانهای شارژینگ عبوری از بخش سالم سیستم به علاوه جریانهای شارژینگ فاز سالم برروی فیدر خطادار – یعنی سه برابر جریان شارژینگ در هر فاز از بخش سالم سیستم.
میتوان از تنظیم رله برابر با۳۰ درصد این مقدار برای تامین حفاظت بدون خطر قطع ناشی از جریانهای شارژینگ خازنی سیستم سالم استفاده کرد.
با توجه به اینکه هیچ جریان خطایی وجود ندارد، این امکان وجود دارد که رله را در محل و بعد از اعمال عمدی خطاهای زمین در نقاط مختلف سیستم و اندازهگیری جریانهای ماندهی منتجه بکار برد.
اگر امکان تنظیم کردن رله بر روی مقداری بین جریان شارژینگ روی فیدر تحت حفاظت و جریان شارژینگ برای باقی سیستم وجود داشته باشد، تجهیزات جهتدار لازم نیستند و میتوان VT را همراه با آن قرار داد.
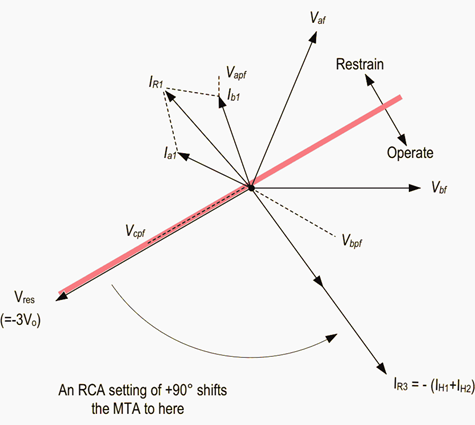
شکل ۶ – دیاگرام برداری رله
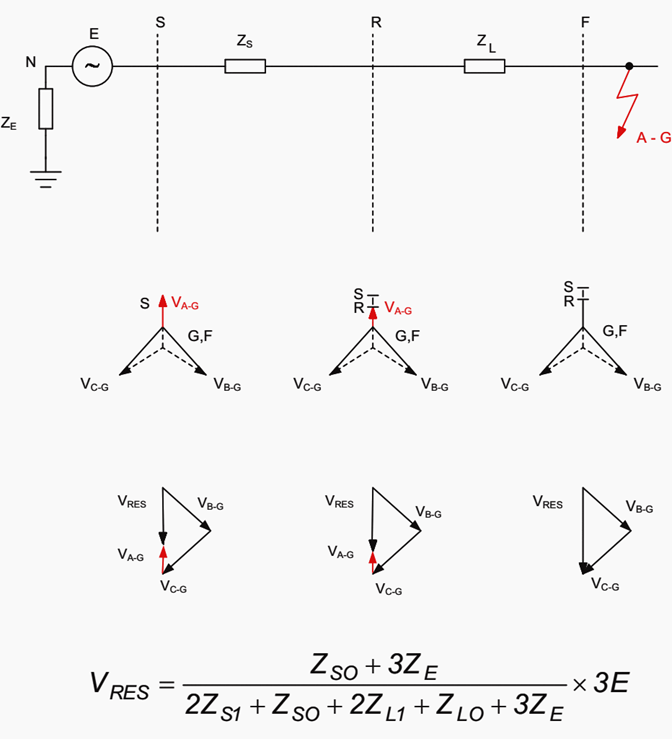
۳-۲) روش ولتاژ مانده
خطای زمین تکی در صورت افزایش ولتاژ بین نقطهی خنثی سیستم و زمین رخ میدهد که ممکن است توسط رلهای تشخیص داده شود که ولتاژ ماندهی سیستم را اندازه میگیرد (که بطور نرمال برای سیستم سالم و کاملا متعادل برابر با صفر است). در نتیجه، هیچ CT لازم نیست و این روش ممکن است در جایی مفید واقع شود که تدارک تعداد زیادی از CTهای تعادل هستهای غیر ممکن یا دشوار باشد که این امر بخاطر محدودیتهای فیزیکی یا زمینهای پرهزینه است.
VTهای مورد استفاده برای وطیفه باید مناسب باشند در نتیجه VTهای ۳-فاز ۳-شاخهای مناسب نیستند و رله معمولا دارای الارم و تنظیمات قطع است و هرکدام تاخیرهای زمانی قابل تنظیم دارند.
ولتاز تنظیمی باید از روی ارتینگ و امپدانسهای سیستم محاسبه شوند که نمونهای برای سیستم با زمین مقاومتی در شکل ۷ نشان داده شده است.
درجهبندی رله ها باید با دقت انجام شود زیرا ولتاز مانده توسط تمام رلهها در بخش تحت تاثیر قرار گرفته [خطادار] سیستم تشخیص داده میشود.
درجهبندی باید با در نظر داشتن این امر انجام شود و معمولا مبنای زمانی برای فراهم آوردن آلارمها (مرحلهی اول) با مرحلهی دوم دارای زمان قطع معین بالا برای پشتیبانی خواهد بود.
۴) سیستم زمین شده با سیمپیچ پترسون
ارتینگ سیستم قدرت فشار قوی با استفاده از راکتور معادل خازن موازی سیستم تحت عنوان ارتینگ سیمپیچ پترسون (یا سیمپیچ رزونانس) شناخته میشود.
با استفاده از این روش، خطای زمین تکی منجر به جریان زمین صفر عبوری (برای تعادل کامل بین اندوکتانس ارتینگ و خازن موازی سیستم) میشود و در نتیجه میتوان سیستم را در این حالت برای دورهی زمانی زیادی بکار انداخت در حالیکه خطا مکانیابی و اصلاح میشود.
مثال حفاظت خطای زمین موتور فشار قوی
این بخش مثالهایی در رابطه با حفاظت از موتورهای القایی فشار قوی و فشار ضعیف اراپه میدهد.
جدول ۱ پارامترهای مربوط به موتور القایی فشار قوی تحت حفاظت را ارائه میدهد. با استفاده از رله ی حفاظتی Alstom MiCOM P241، تنظیمات حفاظت در برابر خطای زمین محاسبه میشود.
جدول ۱- پارامترهای موتور القایی فشار قوی
خروجی نامی 1000kW CMR
ولتاژ نامی 3.3kV
فرکانس نامی 50Hz
ضریب قدرت/بازده نامی 0.9/0.92
زمان ایستادگی توقف سرد/گرم 20/7 sec
جریان راهاندازی 550% DOL
راهاندازیهای مجاز سرد/گرم 3/2
نسبت CT 250/1 A
زمان راهاندازی در ۱۰۰ درصد ولتاژ 4 sec
زمان راهاندازی در ۸۰ درصد ولتاژ 5.5 sec
ثابت زمانی گرمایش/سرمایش 25/75 mins
ارتینگ سیستم کامل
دستگاه کنترلی مدارشکن
فرض بر این است که هیچ CBCT وجود نداشته باشد. تنظیمات معمول ۳۰ درصد جریان نامی موتور بکار برده میشود که به تنظیمات رله ی خطای زمین زیر منجر میشود:
0.3 × 211/250 = 0.25 × In
مقاومت پایدارساز لازم است که مقدار آن مطابق بر رابطهی فوق برای جلوگیری از عملکرد نادرست ناشی از جریان نشتی CT در حین راهاندازی بخاطر اشباع CT محاسبه میشود. با مقاومت پایدارساز، تریپینگ لحظه ای مجاز است.
روش دیگر این است که مقاومت پایدارساز بکار برده شود و از تاخیر زمانی معینی همراه با المان خطای زمین بهره برد. اما، تاخیر زمانی باید با آزمون و خطا در زمان راه اندازی یافته شود.


مطالب زیر را حتما مطالعه کنید

انواع روش های راه اندازی موتور سه فاز

طراحی و انتخاب موتور های الکتریکی

اندازه گیری مقاومت عایقی موتور
